80
DOC.
1
MECHANICS LECTURE NOTES
do)
-co2£mx
- -
=
X'
+
X"
+
da
(o2Ymy
+
--Ymx
=
Y'
+ Y" +
YY
at
o
=
z'
+
z"
+
£z
dco
2)
-
co2Yjmxz
-
-
=
hX"
+
Yj(z%
-
xZ)
1)
+m2YJmyz
-
-jrY.mxz =
-hll
+
-
zX)
I~
yX)
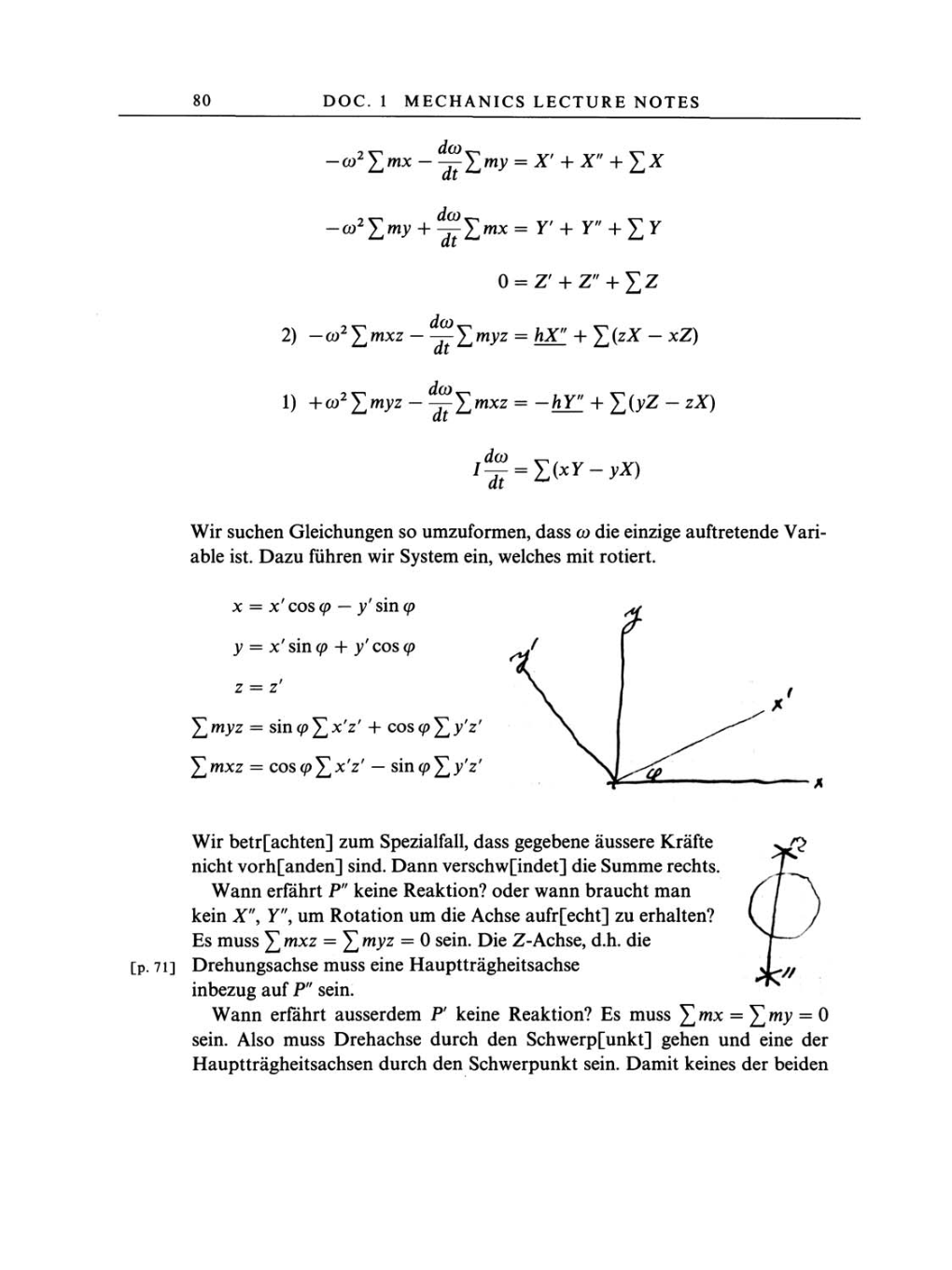
Wir suchen
Gleichungen
so
umzuformen,
dass
w
die
einzige
auftretende Vari-
able
ist.
Dazu führen wir
System ein,
welches
mit rotiert.
x
=
x cos
(p
-
y sin
q
y
=
x' sin
(p
+
y'
cos
p
z
=
Z
Yjinyz
=
sinp£x'z'
+
cos
p£y'z'
£mxz
=
cos
p£x'z'
-
sinj
Wir
betr[achten]
zum
Spezialfall,
dass
gegebene
äussere
Kräfte
nicht
vorh[anden]
sind. Dann
verschw[indet]
die
Summe rechts.
Wann erfährt
P" keine Reaktion? oder
wann
braucht
man
kein
X",
Y",
um
Rotation
um
die
Achse
aufr[echt]
zu
erhalten?
Es
muss
Ymxz
=
Y
myz
=
0 sein.
Die
Z-Achse,
d.h. die
[p.
71]
Drehungsachse muss
eine
Hauptträgheitsachse
inbezug
auf
P" sein.
Wann erfahrt
ausserdem P' keine Reaktion? Es
muss
£mx
=
£my
=
0
sein.
Also
muss
Drehachse durch den
Schwerp[unkt] gehen
und
eine
der
Hauptträgheitsachsen
durch den
Schwerpunkt
sein.
Damit keines der beiden